Affiliations
Member of the IMages, leArning, Geometry and Statistics (IMAGeS) group, ICube Lab (UMR 7357), sub-group Biomedical Image Processing.
Member of the transversal program Imaging and Robotics for Medicine and Surgery (IRMC).
Member of ITI HealthTech Institute.






Keywords
Medical imaging – Computer-Assisted Interventions – Automatic preoperative surgical planning – 3D simulation – Geometric constraint solving – Solution space browsing – Multi-criteria optimization – Virtual/augmented reality – Haptics – RF ablation – Cryoablation – Neurosurgery (DBS/SEEG) – Robotic planning.
Diplomas and past affiliations
- In sabbatical (délégation) at INRIA (2008–2010), IRISA, Rennes – Bretagne Atlantique (INRIA), VISAGES group.
- Habilitation à Diriger des Recherches (2011): “Modélisation géométrique et réalité virtuelle pour l’assistance à la planification de trajectoires en chirurgie mini-invasive.”
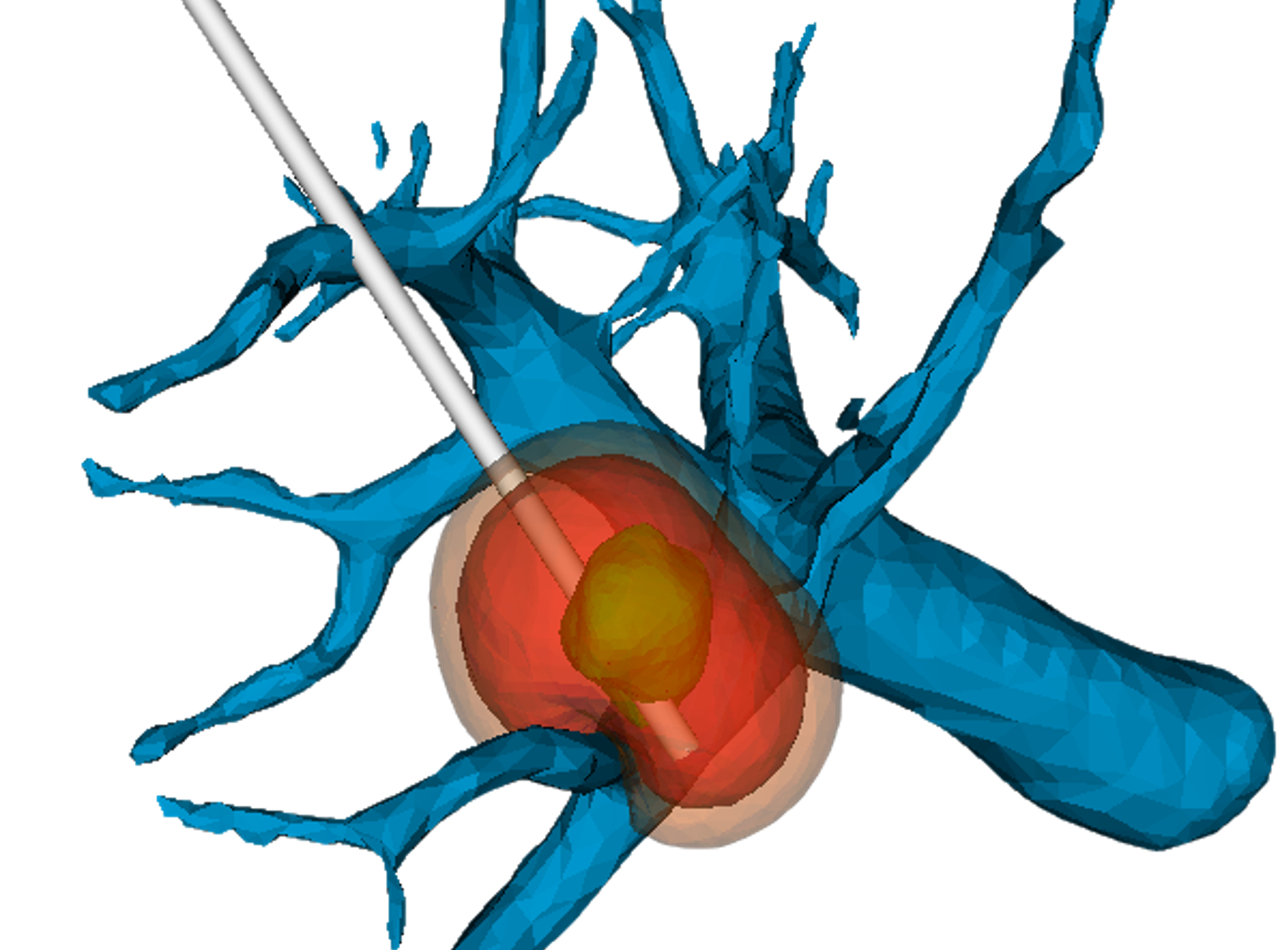
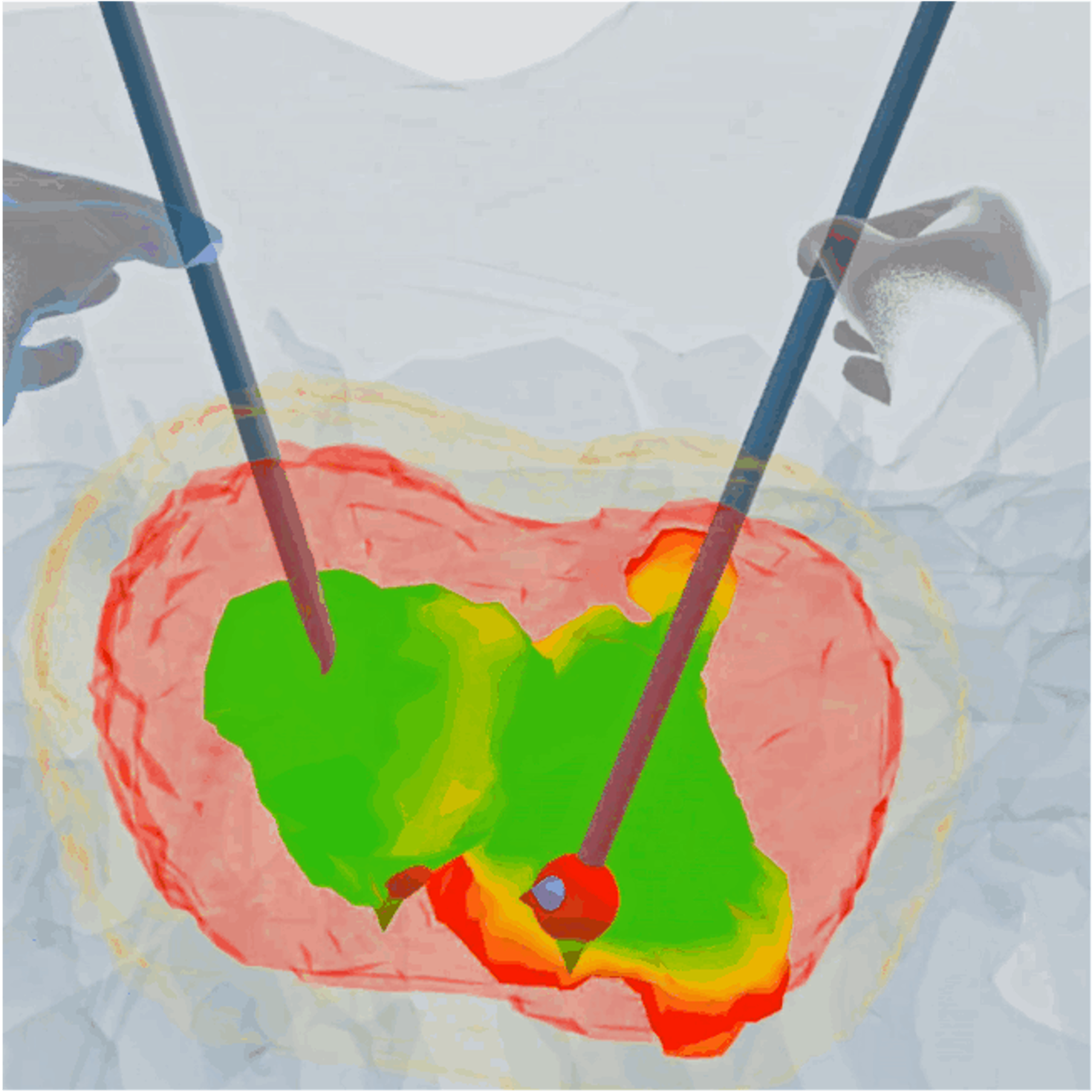
- Post-Doc at IRCAD (2002): “Simulation d’ablation de tumeurs du foie par RF percutanée incluant l’effet de la vascularisation.”
- PhD (2001): “Sélection dans l’espace des solutions engendrées par un plan de construction géométrique.”